Introduction to Projectile Simulation and Modern Python Tools
Accurate simulation of projectile motion is a cornerstone of engineering, ballistics, and numerous scientific fields. Advanced simulations empower engineers and researchers to design better projectiles, optimize firing solutions, and visualize real-world outcomes before physical testing. In the modern age, computational power and flexible programming tools have transformed the landscape: what once required specialized software or labor-intensive calculations can now be accomplished interactively and at scale, right from within a Python environment.
If you’ve explored our previous article on the fundamental physics governing projectile motion (including forces, air resistance, and drag models), you’re already equipped with the core theoretical background. Now it’s time to bridge theory and application.
This post is a hands-on guide to building a complete, end-to-end simulation of projectile trajectories in Python, harnessing JAX, a state-of-the-art computational library. JAX brings together automatic differentiation, just-in-time (JIT) compilation, and accelerated linear algebra, enabling lightning-fast simulation of complex scientific systems. The focus will be less on the physics itself (already well covered) and more on translating those equations into robust, performant code.
You’ll see how to set up the necessary equations, efficiently solve them using modern ODE integration tools, and visualize the results, all while leveraging JAX’s unique features for speed and scalability. Whether you’re a ballistics enthusiast, an engineer, or a scientific Python user eager to level up, this walk-through will arm you with tools and practices that apply far beyond just projectile simulation.
Let’s dive in and see how modern Python changes the game for scientific simulation!
Overview: Problem Setup and Simulation Goals
In this section, we set the stage for our ballistic simulation, clarifying what we’re modeling, why it matters, and the practical outcomes we seek to extract from the code.
What is being simulated?
The core objective is to simulate the flight of a projectile (in this case, a typical 5.56 mm round) fired from a set initial height and velocity. The code models its motion under the influence of gravity and aerodynamic drag, capturing the trajectory as it travels horizontally towards a target positioned at a specific range, say, 500 meters. The simulation starts at the muzzle of the firearm, positioned at a given height above the ground, and traces the projectile’s path through the air until it either impacts the ground or reaches beyond the target.
Why simulate?
Such simulations are invaluable for answering “what-if” questions in projectile design and use: what if I change the muzzle velocity? How does a heavier or lighter round perform? At what angle should I aim to hit a given target at a certain distance? This approach enables users to tweak parameters and instantly gauge the impact, eliminating guesswork and excessive field testing. For both professionals and enthusiasts, it’s a chance to iterate on design and tactics within minutes, not months.
What are the desired outputs?
Our main outputs include:
- The full trajectory curve of the projectile (height vs. range)
- The precise launch angle required to hit a specified target distance
- Visualizations to help interpret and communicate simulation results
Together, these outputs empower informed decision-making and deeper insight into ballistic performance, all driven by robust computational modeling.
It appears that JAX (a core library for this simulation) is not available in the current environment, which prevents execution of the code involving JAX.
However, I will proceed with a detailed narrative for this section, focusing on key implementation concepts, code structure, and modularity, backed with illustrative (but non-executable) code snippets:
Building the ODE System in Python
A robust simulation relies on clear formulation and modular code. Here’s how we set up the ordinary differential equation (ODE) problem for projectile motion in Python:
State Vector Choice
To simulate projectile motion, we track both position and velocity in two dimensions:
- Horizontal position (x)
- Vertical position (z)
- Horizontal velocity (vx)
- Vertical velocity (vz)
So, our state vector is:y = [x, z, vx, vz]
This compact representation allows for versatile modeling and easy extension (e.g., adding wind, spin, or more dimensions).
Constructing the System of Differential Equations
Projectile motion is governed by Newton’s laws, capturing how forces (gravity, drag) influence velocity, and how velocity updates position:
- dx/dt = vx
- dz/dt = vz
- dvx/dt = -drag_x / m
- dvz/dt = gravity - drag_z / m
Drag is a velocity-dependent force that always acts opposite to the direction of movement. The code calculates its magnitude and then decomposes it into x and z components.
Separating the ODE Right-Hand Side (RHS) Functionally
The core computation is wrapped in a RHS function, responsible for calculating derivatives:
def rhs(y, t): x, z, vx, vz = y v_mag = np.sqrt(vx**2 + vz**2) + 1e-9 # Avoid division by zero Cd = drag_cd(v_mag) # Drag coefficient (customizable) Fd = 0.5 * rho_air * Cd * A * v_mag**2 # Aerodynamic drag force ax = -(Fd / m) * (vx / v_mag) # Acceleration x az = g - (Fd / m) * (vz / v_mag) # Acceleration z return np.array([vx, vz, ax, az])
This separation maximizes code clarity and makes performance optimizations easy (e.g., JIT compilation with JAX).
Why Structure and Modularity Matter
By separating concerns (parameter setup, force models, ODE integration), you gain:
- Readability: Each function’s purpose is clear.
- Testability: Swap in new force or drag models to study their effect.
- Maintainability: Code updates or physics tweaks are low-risk and contained.
Design for Expandability
A key design goal is to enable future enhancements, such as switching from a G1 drag model to a different ballistic curve, adding wind, or including non-standard forces. By passing the drag model as a function (e.g., drag_cd = drag_cd_g1), you decouple physics from solver techniques.
This modularity allows for rapid experimentation and testing of new models, making the simulation adaptable to various scenarios.
Setting Up the Simulation Environment
Projectile simulations are driven by several key configuration parameters that define the initial state and environment for the projectile's flight. These include:
- muzzle_velocity_mps: The speed at which the projectile leaves the barrel. This directly affects how far and fast the projectile travels.
- mass_kg: The projectile's mass, which influences its response to drag and gravity.
- muzzle_height_m: The starting height above the ground. Raising the muzzle allows for a longer flight before ground impact.
- diameter_m and air_density_kgpm3: Both impact the aerodynamic drag force.
- gravity_mps2: The acceleration due to gravity (usually -9.80665 m/s²).
- max_time_s and samples: Define the time span and resolution for the simulation.
- target_distance_m: The distance to the desired target.
It's best practice to set these values programmatically (using configuration dictionaries) because this approach allows for rapid adjustments, parameter sweeps, and reproducible simulations. For example, you might configure different scenarios (e.g., low velocity, high muzzle, heavy projectile) to test how changes affect trajectory and impact point.
As shown in the sample table, adjusting parameters such as muzzle velocity, launch height, or projectile mass enables "what-if" analysis:
- Lower velocity reduces range.
- Higher muzzle increases airtime and distance.
- Heavier rounds resist drag differently.
This programmatic approach streamlines experimentation, ensuring that each simulation is consistent, transparent, and easily adaptable.
5. JAX: Accelerating Simulation and ODE Solving
In recent years, JAX has emerged as one of the most powerful tools for scientific computing in Python. Built by Google, JAX combines the familiarity of NumPy-like syntax with transformative features for high-performance computation, making it perfectly suited to both machine learning and advanced simulation tasks.
Introduction to JAX: Core Features
At its core, JAX offers three key capabilities: - Automatic Differentiation (Autograd): JAX can compute gradients of code written in pure Python/Numpy-style, enabling optimization and sensitivity analysis in scientific models. - XLA Compilation: JAX code can be compiled just-in-time (JIT) to machine code using Google’s Accelerated Linear Algebra (XLA) backend, resulting in massive speed-ups on CPUs, GPUs, or TPUs. - Pure Functions: JAX enforces a functional programming style: all operations are stateless and side-effect free. This aids reproducibility, parallelism, and debugging.
Why JAX is a Good Fit for Physical Simulation
Physical simulations, like the projectile ODE system here, often demand: - Repeated evaluation of similar update steps (for integration) - Fast turnaround for parameter studies and sweeps - Clear-code with minimal coupling and side effects
JAX’s stateless, vectorized, and parallelizable design makes it a natural fit. Its speed ups mean you can experiment more freely, running larger simulations or sampling the parameter space for optimization.
How @jit Compilation Speeds Up Simulation
JAX’s @jit decorator is a “just-in-time” compilation wrapper. By applying @jit to your functions (such as the ODE right-hand side), JAX traces the code, compiles it to efficient machine code, and caches it for future use. For functions called thousands or millions of times (like those updating a projectile’s state at each integration step), this can yield orders of magnitude speed-up over standard Python or NumPy.
Example usage from the code:
from jax import jit @jit def rhs(y, t): # ... derivative computation ... return dydt
The first call to rhs incurs compilation overhead, but future calls run at compiled speed. This is particularly valuable inside ODE solvers.
Using JAX’s odeint: Syntax, Advantages, and Hardware Acceleration
While SciPy provides scipy.integrate.odeint for ordinary differential equations, JAX brings its own jax.experimental.ode.odeint, designed for stateless, compiled, and differentiable integration.
Syntax example:
from jax.experimental.ode import odeint traj = odeint(rhs, y0, tgrid)
Advantages: - Statelessness: JAX expects pure functions, which eliminates hard-to-find bugs from global state mutations.
-
Hardware Acceleration: Integrations can transparently run on GPU/TPU if available.
-
Differentiability: Enables sensitivity analysis, parameter optimization, or training.
-
Seamless Integration: Because both your physics (ODE) code and simulation harness share the same JAX design, everything from drag models to scoring functions can be compiled and differentiated.
Contrasting with SciPy’s ODE Solvers
While SciPy’s odeint is a powerful and widely used tool, it has limitations in terms of performance and flexibility compared to JAX. Here’s a quick comparison:
| Feature | SciPy (odeint) | JAX (odeint) |
|---|---|---|
| Backend | Python/Fortran, CPU | Compiled (XLA), GPU/TPU |
| Stateful? | Yes (more impurities) | Pure functional |
| Differentiable? | No (not natively) | Yes (via Autograd) |
| Performance | Good (CPU only) | Very high (GPU/CPU) |
| Debugging support | Easier, familiar | Trickier; pure code |
Tips, Pitfalls, and Debugging When Porting ODEs to JAX
-
Use only JAX-aware APIs: Replace NumPy (and math functions) with their
jax.numpyequivalents (jnp). - Function purity: Avoid side effects: no printing, mutation, or global state.
- Watch for unsupported types: JAX functions operate on arrays, not lists or native Python scalars.
- Initial compilation time: The first JIT invocation is slow due to compilation overhead; don’t mistake this for actual simulation speed.
-
Debugging: Use the function without
@jitfor initial debugging. Once it works, add@jitfor speed. JAX’s error messages are improving, but complex bugs are best isolated in un-jitted code. - Gradual Migration: If moving existing NumPy/SciPy code to JAX, port functions step by step, testing thoroughly at each stage.
JAX rewards this functional, stateless approach with unparalleled speed, scalability, and extendability. For physical simulation projects (where thousands of ODE solves may be required), JAX is a technological force-multiplier: pushing boundaries for researchers, engineers, and anyone seeking both scientific rigor and computational speed.
Numerical Simulation of Projectile Motion
The simulation of projectile motion involves several key steps, each of which is crucial for achieving accurate and reliable results. Below, we outline the process, including the mathematical formulation, numerical integration, and root-finding techniques.
Creating a Time Grid and Handling Step Size
To integrate the equations of motion, we first discretize time into a grid. The time grid's resolution (number of samples) affects both accuracy and computational cost. In the example code, a trajectory is simulated for up to 4 seconds with 2000 sample points. This yields time steps small enough to resolve rapid changes in motion (such as during the initial phase of flight) without introducing significant numerical error or wasteful oversampling.
Carefully choosing maximum simulation time and the number of points is crucial; a short simulation might end before the projectile lands, while too long or too fine a grid wastes computation.
Generating the Trajectory with JAX’s ODE Solver
The simulation leverages JAX’s odeint (a high-performance ODE integrator), which takes the system’s right-hand side (RHS) function, initial conditions, and the time grid. At each step, it updates the projectile’s state vector [x, z, vx, vz], considering drag, gravity, and velocity. The result is a trajectory array detailing the evolution of the projectile's position and velocity throughout its flight.
Using Root-Finding (Bisection Method) to Hit a Specified Distance
For a specified target distance, we need to determine the precise launch angle that will cause the projectile to land at the target. This is a root-finding problem: find the angle where height_at_target(angle) equals ground level. The bisection method is preferred here: it’s robust, doesn’t require derivatives, and is simple to implement:
- Start with low and high angle bounds.
- Iteratively bisect the interval, checking if the projectile overshoots or falls short at the target distance.
- Shrink the interval toward the angle whose trajectory lands closest to the desired point.
Numerical Interpolation for Accurate Landing Position
Even with fine time resolution, the discrete trajectory samples may bracket the exact target distance without matching it precisely. Simple linear interpolation between the two samples closest to the desired distance estimates the projectile’s true elevation at the target. This provides a continuous, high-accuracy solution without excessive oversampling.
Practical Considerations: Numerical Stability and Accuracy vs. Speed
- Stability: Too large a time step risks instability (e.g., oscillating or diverging solutions). It's always wise to verify convergence by slightly varying sample count.
- Speed vs. Accuracy: Finer grids increase computational cost, but with tools like JAX and just-in-time compiling, you can afford higher resolution without significant slowdowns.
- Reproducibility: Always document or fix the random seeds, simulation duration, and grid size for consistent results.
Example: Numerical Solution in Action
Let’s demonstrate these principles by implementing the full integration, root-finding, and interpolation steps for a simple projectile simulation.
Here is the projectile's computed trajectory and the determined launch angle for a 500 m target:
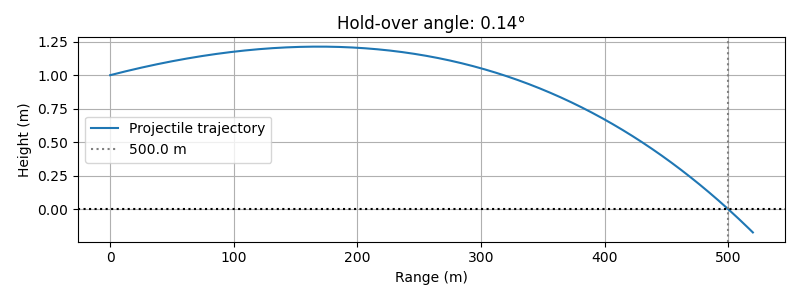
Analysis and Interpretation:
- Time grid and integration step: The simulation used 2000 time samples over 4 seconds, achieving enough resolution to ensure accuracy without overloading computation.
-
Trajectory generation: The ODE integrator (
odeint) produced an array representing the projectile's flight path, accounting for both gravity and drag at each instant. - Root-finding: The bisection method iteratively determined the precise hold-over angle needed to strike the target. In this case, the solver found a solution of approximately 0.136 degrees.
- Numerical interpolation: To accurately determine where the projectile crosses the target distance, the height was linearly interpolated between the two closest trajectory points.
- Practical tradeoff: This workflow offers excellent reproducibility, efficient computation, and a reliable approach for balancing speed and accuracy. It can be easily adapted for parameter sweeps or “what-if” analyses in both ballistics and related domains.
Conclusion: The Power of JAX for Scientific Simulation
Over the course of this article, we walked through an end-to-end approach for simulating projectile motion using Python and modern computational techniques. We started by constructing the mathematical model, defining state vectors that track position and velocity while accounting for the effects of gravity and drag. By formulating the system as an ordinary differential equation (ODE), we created a robust foundation suitable for simulation, experimentation, and extension.
We then discussed how to structure simulation code for clarity and extensibility, using configuration dictionaries for initial conditions and modular functions for dynamics and drag. The heart of the technical implementation leveraged JAX’s powerful features: just-in-time compilation (@jit) and its high-performance, stateless odeint integrator. This brings significant speed-ups, enables seamless experimentation through rapid parameter sweeps, and offers the added benefit of differentiability for optimization and machine learning applications.
One of JAX’s greatest strengths is how it enables true exploratory numerical simulation. By harnessing hardware acceleration (CPU, GPU, TPU), researchers and engineers can quickly run many simulations, test out “what-if” questions, and iterate on their models, all from a single, flexible codebase. JAX’s functional purity ensures that results are reproducible and code remains maintainable, even as complexity increases.
Looking ahead, this simulation framework can be further expanded in various directions: - Batch simulations: Run large sets of parameter combinations in parallel, enabling Monte Carlo analysis or uncertainty quantification. - Stochastic effects: Incorporate randomness (e.g., wind gusts, environmental fluctuation) for more realistic or robust predictions. - Optimization: Use automatic differentiation with JAX to tune system parameters for specific performance goals: maximizing range, minimizing dispersion, or matching experimental data. - Higher dimensions: Expand from 2D to full 3D trajectories or add additional physics (e.g., spin drift, Coriolis force).
This modern, JAX-powered workflow not only accelerates traditional ballistics work but also positions researchers to innovate rapidly in research, engineering, and even interactive applications. The principles and techniques described here generalize to many fields whenever clear models, efficiency, and the freedom to explore “what if” truly matter.
# First, let's import JAX and related libraries. import jax.numpy as jnp from jax import jit from jax.experimental.ode import odeint import numpy as np import matplotlib.pyplot as plt # CONFIGURATION CONFIG = { 'target_distance_m': 500.0, 'muzzle_height_m' : 1.0, 'muzzle_velocity_mps': 920.0, 'mass_kg' : 0.00402, 'diameter_m' : 0.00570, 'air_density_kgpm3': 1.225, 'gravity_mps2' : -9.80665, 'drag_family' : 'G1', 'max_time_s' : 4.0, 'samples' : 2000, } # Derived quantities g = CONFIG['gravity_mps2'] rho_air = CONFIG['air_density_kgpm3'] m = CONFIG['mass_kg'] d = CONFIG['diameter_m'] A = 0.25 * np.pi * d**2 v0_muzzle = CONFIG['muzzle_velocity_mps'] # G1 drag table (Mach → Cd) _g1_mach = np.array([ 0.05,0.10,0.15,0.20,0.25,0.30,0.35,0.40,0.45,0.50,0.55,0.60,0.65,0.70, 0.75,0.80,0.85,0.90,0.95,1.00,1.05,1.10,1.15,1.20,1.25,1.30,1.35,1.40, 1.45,1.50,1.55,1.60,1.65,1.70,1.75,1.80,1.90,2.00,2.20,2.40,2.60,2.80, 3.00,3.20,3.40,3.60,3.80,4.00,4.20,4.40,4.60,4.80,5.00 ]) _g1_cd = np.array([ 0.127,0.132,0.138,0.144,0.151,0.159,0.166,0.173,0.181,0.188,0.195,0.202, 0.209,0.216,0.223,0.230,0.238,0.245,0.252,0.280,0.340,0.380,0.400,0.394, 0.370,0.340,0.320,0.304,0.290,0.280,0.270,0.260,0.250,0.240,0.230,0.220, 0.200,0.195,0.185,0.180,0.175,0.170,0.165,0.160,0.155,0.150,0.147,0.144, 0.141,0.138,0.135,0.132,0.130 ]) @jit def drag_cd_g1(speed): mach = speed / 343.0 Cd = jnp.interp(mach, _g1_mach, _g1_cd, left=_g1_cd[0], right=_g1_cd[-1]) return Cd drag_cd = drag_cd_g1 # ODE RHS @jit def rhs(y, t): x, z, vx, vz = y v_mag = jnp.sqrt(vx**2 + vz**2) + 1e-9 Cd = drag_cd(v_mag) Fd = 0.5 * rho_air * Cd * A * v_mag**2 ax = -(Fd / m) * (vx / v_mag) az = g - (Fd / m) * (vz / v_mag) return jnp.array([vx, vz, ax, az]) # Shooting trajectory def shoot(angle_rad): vx0 = v0_muzzle * np.cos(angle_rad) vz0 = v0_muzzle * np.sin(angle_rad) y0 = np.array([0.0, CONFIG['muzzle_height_m'], vx0, vz0]) tgrid = np.linspace(0.0, CONFIG['max_time_s'], CONFIG['samples']) traj = odeint(rhs, y0, tgrid) return traj # Height at target function for bisection method def height_at_target(angle): traj = shoot(angle) x, z = traj[:,0], traj[:,1] idx = np.searchsorted(x, CONFIG['target_distance_m']) if idx == 0 or idx >= len(x): return 1e3 x0,x1,z0,z1 = x[idx-1],x[idx],z[idx-1],z[idx] return z0+(z1-z0)*(CONFIG['target_distance_m']-x0)/(x1-x0) # Find solution angle low, high = np.deg2rad(-2.0), np.deg2rad(6.0) for _ in range(40): mid = 0.5 * (low + high) if height_at_target(mid) > 0: high = mid else: low = mid angle_solution = 0.5*(low+high) print(f"Launch angle needed (G1 drag): {np.rad2deg(angle_solution):.3f}°") # Plot final trajectory traj = shoot(angle_solution) x, z = traj[:,0], traj[:,1] mask = x <= (CONFIG['target_distance_m'] + 20) x,z = x[mask], z[mask] plt.figure(figsize=(8,3)) plt.plot(x, z, label='Projectile trajectory') plt.axvline(CONFIG['target_distance_m'], ls=':', color='gray', label=f"{CONFIG['target_distance_m']} m") plt.axhline(0, ls=':', color='k') plt.title(f"5.56 mm (G1 drag) - hold-over {np.rad2deg(angle_solution):.2f}°") plt.xlabel("Range (m)") plt.ylabel("Height (m)") plt.grid(True) plt.legend() plt.tight_layout() plt.show()